机器人运动学问题.请看机构简图,我已标明运动参数及坐标系.请看机构简图,我已标明运动参数及坐标系.如图:J1⊥J2⊥J3⊥J4⊥J5J2 J3 J4交于一点,J4 J5相交J1 J2公垂线长度为a1(也就是连杆长度
来源:学生作业帮助网 编辑:作业帮 时间:2024/04/28 04:43:19
机器人运动学问题.请看机构简图,我已标明运动参数及坐标系.请看机构简图,我已标明运动参数及坐标系.如图:J1⊥J2⊥J3⊥J4⊥J5J2 J3 J4交于一点,J4 J5相交J1 J2公垂线长度为a1(也就是连杆长度
机器人运动学问题.请看机构简图,我已标明运动参数及坐标系.
请看机构简图,我已标明运动参数及坐标系.如图:
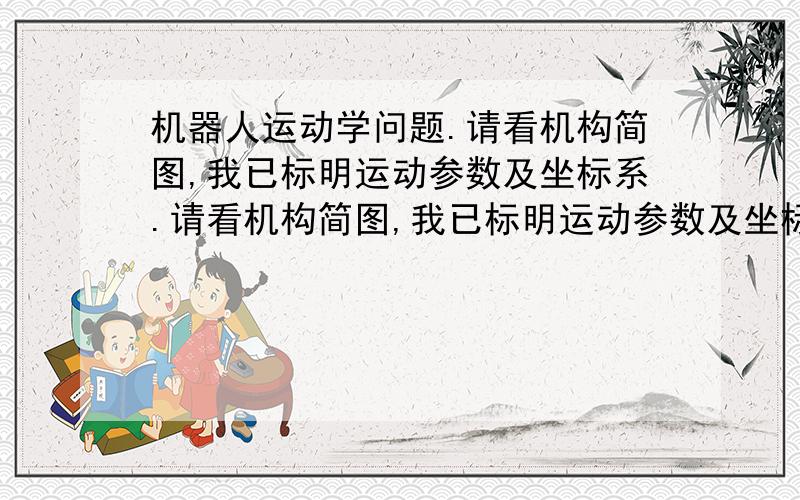
J1⊥J2⊥J3⊥J4⊥J5
J2 J3 J4交于一点,J4 J5相交
J1 J2公垂线长度为a1(也就是连杆长度),
连杆偏距为d1,
d2也为连杆偏距.
请问:我坐标系建对了吗?谁能帮我说下连杆参数表.要是能列出每个连杆的变换矩阵就更好了,谢谢.
我邮箱xujixiaowei@163.com
分不是问题

机器人运动学问题.请看机构简图,我已标明运动参数及坐标系.请看机构简图,我已标明运动参数及坐标系.如图:J1⊥J2⊥J3⊥J4⊥J5J2 J3 J4交于一点,J4 J5相交J1 J2公垂线长度为a1(也就是连杆长度
好好看看机器人导论,看看D-H法
你的问题
i αi-1 ai-1 di θi
1 0 0 0 θ1
2 90 a1 0 θ2
3 90 0 d2 θ3
4 90 0 0 θ4
5 - 90 0 d4 θ5
机器人运动学问题.请看机构简图,我已标明运动参数及坐标系.请看机构简图,我已标明运动参数及坐标系.如图:J1⊥J2⊥J3⊥J4⊥J5J2 J3 J4交于一点,J4 J5相交J1 J2公垂线长度为a1(也就是连杆长度
机器人运动学中主要解决哪些问题?有何意义》?
一个精密机械设计题:画出图示机构运动简图,并计算自由度.我觉得我的有问题.
机构简图如何 绘制
运动学问题~
机构运动简图如下,求算自由度(关键性问题:请指出哪些是活动构件,我搞不清楚特别是有焊接的位置)
机器人静力学和动力学运动学的关系
阐述机构运动简图的内涵.机构运动简图应准确反映实际机构中的哪些项目?
大学物理质点运动学问题
质点运动学问题
理论力学问题 运动学
机构运动简图应包括哪些内容
机构运动简图为什么一定要计算自由度
求这个机构的运动简图
机构运动简图包括哪些内容
请绘出此图的机构运动简图
机构运动简图主要有什么用途
请看我的问题第一条.